|
El motor eléctrico se desarrolló por primera vez en la década de 1830, 30 años después de la primera batería. Curiosamente el motor se desarrolló antes que la primera dinamo o generador.
|
|
1.) Historia e inventores:1834 – Thomas Davenport, de Vermont, desarrolló el primer motor eléctrico real («real» significa lo suficientemente potente para realizar una tarea) aunque Joseph Henry y Michael Faraday crearon los primeros dispositivos de movimiento utilizando campos electromagnéticos. Los primeros «motores» creaban discos giratorios o palancas que se balanceaban hacia adelante y hacia atrás. Estos dispositivos no podían hacer ningún trabajo para la humanidad, pero fueron importantes para abrir el camino a mejores motores en el futuro. Los distintos motores de Davenport eran capaces de hacer funcionar un carro de juguete sobre una pista circular y otras tareas. El carro resultó ser la primera aplicación importante de la energía eléctrica (no fue la bombilla). Finalmente, 30 años después de la muerte de Davenport, en la década de 1850, se construyeron carros eléctricos rudimentarios de tamaño completo. No fue hasta 1873 cuando el motor eléctrico alcanzó finalmente el éxito comercial. Desde la década de 1830, miles de ingenieros pioneros han mejorado los motores y han creado muchas variaciones. Consulte otras páginas para obtener más detalles sobre la vasta historia del motor eléctrico. |

El motor lleva al generador:
Después de que Faraday y Henry desarrollaran motores eléctricos débiles, otro de los primeros pioneros llamado Hippolyte Pixii descubrió que haciendo funcionar el motor al revés podía crear pulsos de electricidad. En la década de 1860 se desarrollaron potentes generadores. La industria eléctrica no pudo comenzar hasta que se desarrollaron los generadores porque las baterías no eran una forma económica de alimentar las necesidades de la sociedad. Lee sobre generadores y dinamos aquí >
2.) Cómo funcionan los motoresLos motores eléctricos pueden funcionar con corriente alterna (AC) o con corriente continua (DC). Los motores de CC se desarrollaron primero y tienen ciertas ventajas y desventajas. Cada tipo de motor funciona de forma diferente pero todos utilizan la potencia del campo electromagnético. Hablaremos de los principios muy básicos de los campos electromagnéticos en los motores antes de pasar a los diferentes tipos de motores. Los motores eléctricos de CA utilizan un devanado secundario y uno primario (imán), el primario está conectado a la red eléctrica de CA (o directamente a un generador) y recibe energía. El secundario recibe energía del primario sin tocarlo directamente. Esto se hace mediante el complejo fenómeno conocido como inducción. Derecha: un ingeniero trabaja en las modificaciones personalizadas de un dron octocóptero. Ocho diminutos motores de corriente continua crean suficiente potencia para levantar kilos de carga útil. Los nuevos diseños de motores como este utilizan metales de tierras raras en el estator para crear campos magnéticos más fuertes en paquetes más pequeños y ligeros. 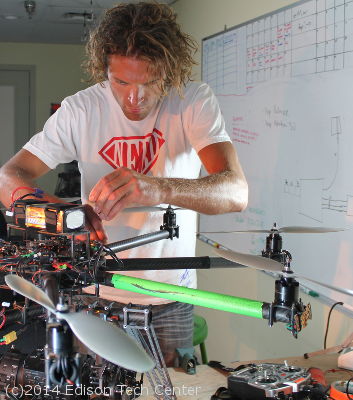 |
 |
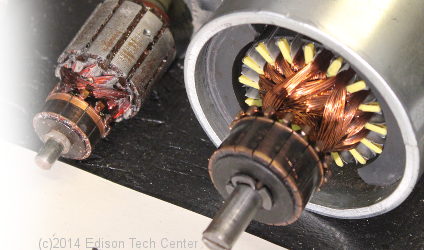
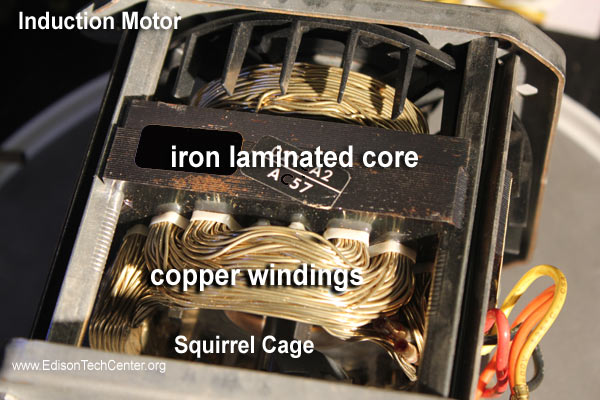
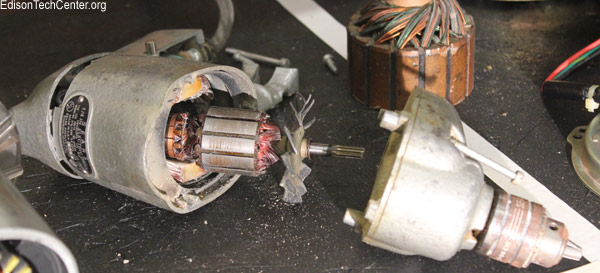
Arriba: Un motor universal que suele encontrarse en la mayoría de las herramientas eléctricas. Tiene un rotor denso y pesado. | Encima: el motor de inducción puede tener una «jaula de ardilla» o una bobina giratoria hueca o una armadura pesada. |
2.a) Partes de un motor eléctrico:
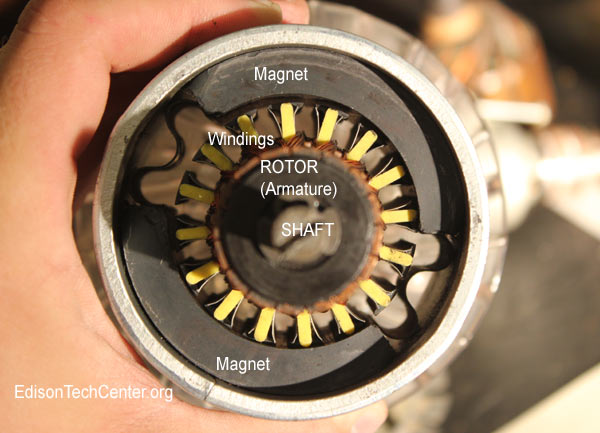
Hay muchos tipos de motores eléctricos pero en general tienen algunas partes similares. Cada motor tiene un estator, que puede ser un imán permanente (como se muestra en el «motor universal» de arriba) o hilos enrollados (un electroimán como en la foto de arriba a la derecha). El rotor se encuentra en el centro (la mayor parte del tiempo) y está sometido al campo magnético creado por el estator. El rotor gira cuando sus polos son atraídos y repelidos por los polos del estator. Vea nuestro vídeo que muestra cómo funciona. Este vídeo trata de un motor de corriente continua sin escobillas en el que el rotor está en el exterior, en otros motores el mismo principio es a la inversa, con los electroimanes en el exterior. Vídeo (1 minuto):
Fuerza de un motor:
La fuerza del motor (par) viene determinada por el voltaje y la longitud del cable de un electroimán en el estator, cuanto más largo sea el cable (lo que significa más bobinas en el estator) más fuerte será el campo magnético. Esto significa más potencia para hacer girar el rotor. Vea nuestro vídeo que se aplica tanto a los generadores como a los motores para saber más.
Armadura – la parte giratoria del motor – esto solía llamarse rotor, soporta las bobinas de cobre que giran. En la foto de abajo no se ven las bobinas porque están bien metidas en el inducido. Una carcasa lisa protege las bobinas de los daños.
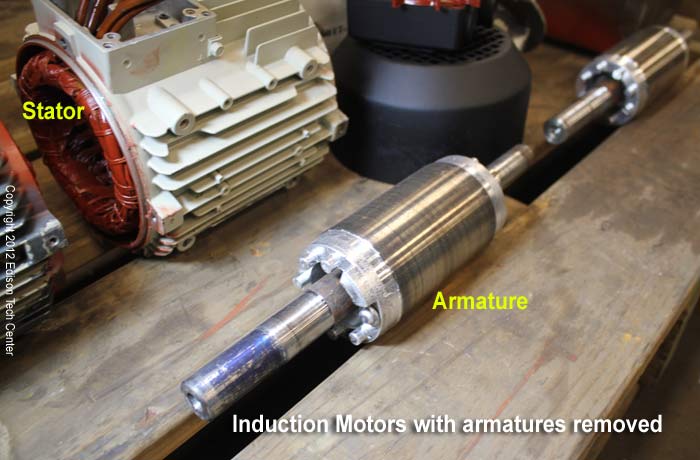
Estator – La carcasa y las bobinas que forman el exterior del motor. El estator crea un campo magnético estacionario.

Arriba: cuatro bobinas distintas se ven claramente en este estator (el inducido fue retirado)
Bobina o «Coil»- hilos de cobre enrollados alrededor de un núcleo para utilizar para crear o recibir energía electromagnética.
Los cables utilizados en los bobinados DEBEN estar aislados. En algunas fotos se ve lo que parece ser devanados de alambre de cobre desnudo, no lo es, es simplemente un esmaltado con una capa transparente.
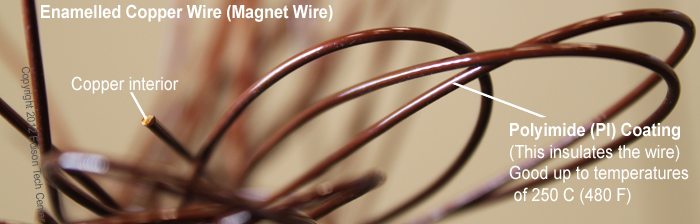
El cobre es el material más común para los devanados. También se utiliza el aluminio, pero debe ser más grueso para soportar la misma carga eléctrica con seguridad. Los devanados de cobre permiten un motor de menor tamaño. Más sobre el cobre >
Se quema un motor, solución de problemas:
Si un motor funciona durante demasiado tiempo o con una carga excesiva, puede «quemarse». Esto significa que la alta temperatura hizo que el aislamiento del bobinado se rompiera o fundiera, los bobinados entonces hacen cortocircuito cuando se tocan y el motor se daña. También se puede quemar un motor si se le aplica más tensión de la que pueden soportar los cables del bobinado. En ese caso, el cable se fundirá en el punto más débil, cortando la conexión. Para comprobar si un motor se ha quemado de esta manera, puede comprobar los ohmios (resistencia) con un multímetro. En general, usted querrá buscar marcas negras en los devanados cuando compruebe un motor.
Jaula de Ardilla – la segunda bobina en un motor de inducción, ver abajo para ver cómo funciona
Inducción – la generación de fuerza electromotriz en un circuito cerrado por un flujo magnético variable a través del circuito. En la corriente alterna el nivel de potencia sube y baja, esto carga el devanado por un momento creando un campo magnético. Cuando la potencia baja en el ciclo, el campo magnético no puede mantenerse y se colapsa. Esta acción transfiere la potencia a través del magnetismo al otro devanado o bobina. APRENDE MÁS sobre la inducción aquí.
3.) Tipos de motores eléctricos de corriente alterna
Motores de corriente alterna (CA):
3. Motores de inducción.a) Motor de inducción
3.b) Motor universal (puede utilizar CC o CA)
3.c) Motores síncronos
3.d) Motores de polos sombreados
3.a) Motor de inducción

Vea nuestra página dedicada al Motor de Inducción aquí >
3.b) Motor universal

Se trata de un potente motor que puede utilizarse tanto con corriente alterna como con corriente continua.
Ventajas:
-Alto par de arranque, y pequeño tamaño (bueno para su uso común en herramientas eléctricas de consumo)
-Puede funcionar a altas velocidades (ideal para lavadoras y taladros eléctricos)
Desventajas:
-Las escobillas se desgastan con el tiempo
Usos: electrodomésticos, herramientas eléctricas de mano
Vea el vídeo a continuación:
3.c) Motores Síncronos (Motor Selsyn)
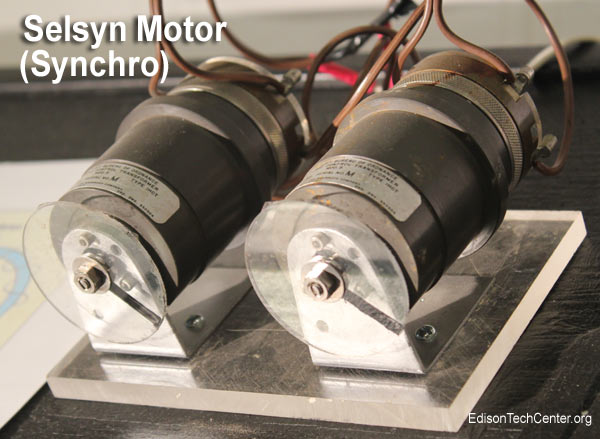
Este motor es similar al de inducción excepto que se mueve con la frecuencia de la línea.
El Motor Selsyn fue desarrollado en 1925 y ahora se conoce como el Synchro. Aprenda más sobre ellos aquí.
Ventajas: Proporciona una velocidad constante que se determina por el número de polos y la frecuencia de alimentación de CA suministrada.
Desventajas: No puede manejar un par variable, este motor se detendrá o «arrancará» a un par determinado.
Usos: un reloj utiliza motores síncronos para proporcionar una velocidad de rotación precisa para las agujas. Este es un motor analógico y aunque la velocidad es precisa, el motor paso a paso sería mejor para trabajar con ordenadores ya que funciona en «pasos» rígidos de una vuelta.
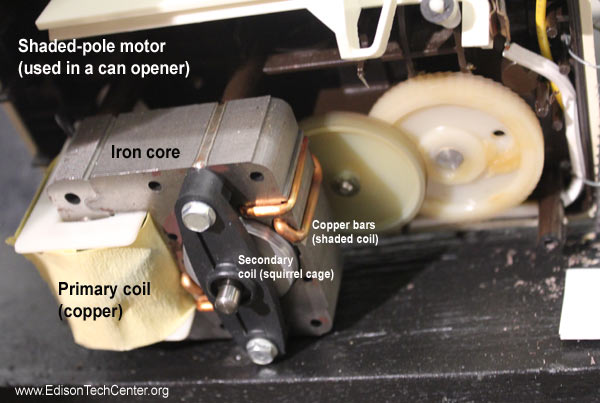
3.d) Motor de polos sombreados
 |
|
Ventajas: alcanza un fuerte nivel de par una vez que el rotor ha comenzado a girar rápidamente.
Se utiliza en ventiladores, electrodomésticos
Desventajas: lento para arrancar, bajo par para arrancar. Se utiliza en ventiladores, se nota la lentitud de arranque de los ventiladores.
Este motor también se utiliza en desagües de lavadoras, abrelatas y otros electrodomésticos.
Otros tipos de motores funcionan mejor para necesidades más potentes por encima de los 125 vatios.
Vea el vídeo a continuación:
4.) Motores de corriente continua (DC):
Los motores de corriente continua fueron el primer tipo de motor eléctrico. Suelen tener una eficiencia del 75-80%. Funcionan bien a velocidades variables y tienen un gran par motor.
4.a) Información general
4.b) Motores de corriente continua con escobillas
4.b.1) Motor de corriente continua con bobinado en derivación
4.b.2) Motor de corriente continua con bobinado en serie
4.b.3) Motores de panqueque
4.b.4) Motor de corriente continua de imanes permanentes
4.b.5) Excitados por separado (Sepex)
4.c) Motores de CC sin escobillas
4.c.1) Motor paso a paso
4.c.2) Motores de CC sin núcleo / sin hierro
Motores de CC con escobillas:
Los primeros motores de CC utilizaban escobillas para transferir la corriente al otro lado del motor. La escobilla se llama así porque al principio se asemejaba a la forma de una escoba. Las pequeñas fibras metálicas frotaban contra una parte giratoria del motor para mantener un contacto constante. El problema de las escobillas es que se desgastan con el tiempo debido a la mecánica. Las escobillas creaban chispas debido a la fricción. Los parques a menudo fundían el aislamiento y provocaban cortocircuitos en el inducido e incluso fundían el conmutador.
Los primeros motores se utilizaban en los ferrocarriles de la calle.
Utiliza un conmutador de anillo partido con escobillas.
Ventajas:
-Se utiliza en un sinfín de aplicaciones, tiene un fácil control de la velocidad utilizando el nivel de tensión a controlar.
-Tiene un alto par de arranque (un potente arranque)
Limitaciones: las escobillas crean fricción y chispas, esto puede sobrecalentar el dispositivo y fundir/quemar las escobillas, por lo tanto la velocidad máxima de rotación es limitada. Las chispas también causan interferencias de radiofrecuencia. (RFI)
Hay cinco tipos de motores de corriente continua con escobillas:
Motor de corriente continua en derivación
Motor de corriente continua en serie
Motor de corriente continua compuesto – compuesto acumulativo y compuesto diferencial
Motor de corriente continua de imán permanente
Motor de corriente continua de excitación separada
Motor de panadería
Motores de corriente continua sin escobillas:
La escobilla se sustituye por un interruptor eléctrico externo que se sincroniza con la posición del motor (invertirá la polaridad según sea necesario para mantener el eje del motor girando en una dirección)
-Más eficientes que los motores de escobillas
-Se utilizan cuando el control de velocidad debe ser preciso (como en unidades de disco, máquinas de cinta, coches eléctricos, etc.)
-Larga vida útil ya que funciona a una temperatura más fría y no hay escobillas que se desgasten.
Tipos de motores de corriente continua sin escobillas:
Motor paso a paso
Motores de corriente continua sin núcleo / sin hierro
4.b) MOTORES DE CC CON CEPILLAS:
4.b.1) Motor de CC en derivación
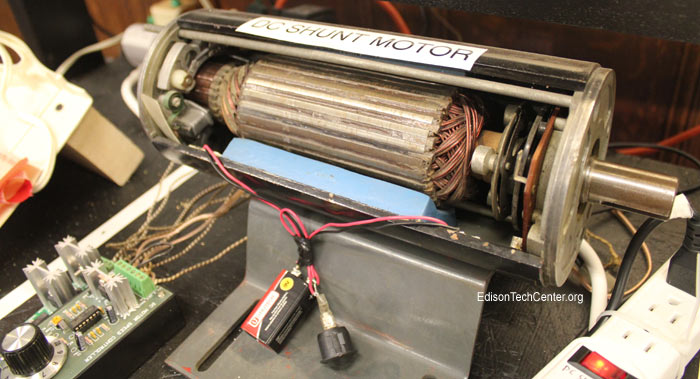
El motor de CC en derivación está cableado de forma que la bobina de campo está conectada en paralelo con el inducido. Ambos devanados reciben la misma tensión. La bobina de campo en derivación se enrolla con muchas vueltas de alambre fino para crear una alta resistencia. Esto asegura que la bobina de campo consumirá menos corriente que el inducido (rotor).
El inducido (visto arriba, es la parte cilíndrica larga y gorda que gira) tiene cables de cobre gruesos, esto es para que pueda pasar mucha corriente a través de él para que el motor arranque.
Cuando el inducido gira (ver foto de abajo) la corriente está limitada por la fuerza contraelectromotriz.
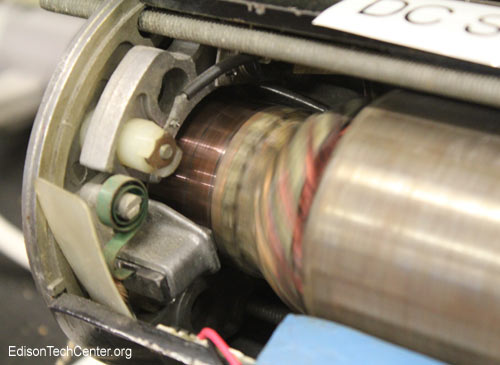
La fuerza de la bobina de campo shunt determina la velocidad y el par del motor.
Ventajas: El motor DC Shunt regula su propia velocidad. Esto significa que si se añade carga el inducido se ralentiza, la CEMF disminuye, lo que resulta en el aumento de la corriente del inducido. Esto da lugar a un aumento del par que ayuda a mover la carga pesada. Cuando se retira la carga el inducido se acelera, la CEMF aumenta lo que limita la corriente y el par disminuye.
El ejemplo de la cinta transportadora: Imagínese una cinta transportadora que se mueve a una velocidad determinada, entonces una caja pesada entra en la cinta. Este tipo de motor mantendrá la cinta en movimiento a una velocidad constante sin importar cuántas cajas se muevan en la cinta.
¡Vea el siguiente vídeo de un motor de corriente continua en acción!:
4.b.2) Motor de corriente continua devanado en serie
El motor devanado en serie es un motor de corriente continua de tipo autoexcitado. El devanado de campo está conectado internamente en serie con el devanado del rotor. El devanado de campo en el estator está así expuesto a toda la corriente generada por el devanado del rotor.
Este tipo de motor es similar a un motor de corriente continua con derivación, salvo que los devanados de campo están hechos de un cable más pesado para que pueda soportar las corrientes más altas.
Usos: Este tipo de motor se utiliza en la industria como motor de arranque debido a su gran par.
Aprenda más sobre el motor con bobinado en serie:
Artículo 1
Artículo 2
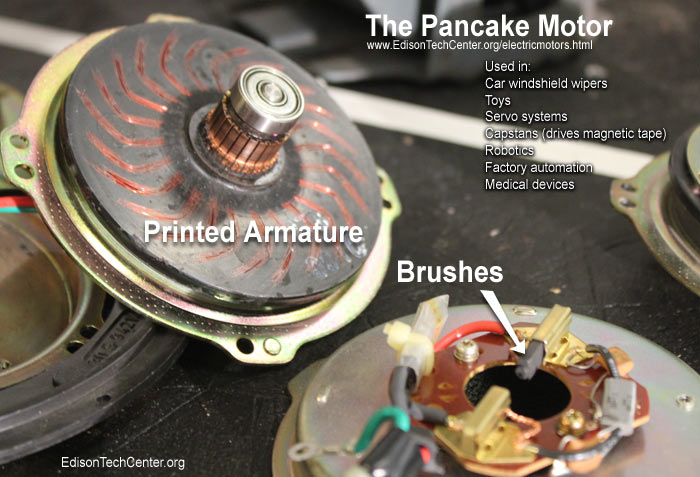
4.b.3) Motor de corriente continua tipo pancake (también conocido como motor de inducido impreso)

El motor tipo pancake es un motor sin hierro. La mayoría de los motores tienen un bobinado de cobre alrededor de un núcleo de hierro.
Video mostrando ejemplos de motores pancake:
Ventajas:
Control de velocidad exacto, perfil plano, no tiene cogging que es causado por el hierro en un electroimán
Desventajas:
La forma plana no es buena para todas las aplicaciones
Tiene un bobinado formado en un disco plano de epoxi entre dos imanes de alto flujo. Es totalmente sin hierro, haciendo una gran eficiencia. Se utiliza en aplicaciones de servo, se diseñó por primera vez como motores de limpiaparabrisas y la industria del vídeo ya que era muy plana en el perfil y tenía un buen control de la velocidad. Los ordenadores y la grabación de vídeo/audio utilizaban cinta magnética, por lo que se necesitaba un control de velocidad preciso y rápido, y para ello se desarrolló el motor de panqueque. Hoy en día se utiliza en una miríada de otras aplicaciones, incluyendo la robótica y los servosistemas.
4.b.4) Motor compuesto de corriente continua (acumulativo y diferencialmente compuesto)
Este es otro motor autoexcitado con bobinas de campo tanto en serie como en derivación. Tiene una regulación de velocidad eficiente y un par de arranque decente.
Aprenda más sobre este tipo de motor aquí.
4.b.5) Motor de corriente continua de imanes permanentes
Este tipo de motor funciona bien a alta velocidad y puede ser muy compacto.
Usos: compresores, otras aplicaciones industriales
Aprenda más sobre este tipo de motor aquí.
4.b.6) De excitación separada (sepex)
El SepEx tiene un devanado de campo que se alimenta por separado del inducido con una señal de corriente continua. El imán de campo también tiene su propia alimentación de corriente continua. Como resultado verá que este tipo de motor tiene cuatro cables – 2 para el campo y 2 para el inducido.
Este motor es un motor de corriente continua con escobillas que tiene curvas de par más amplias que un motor de corriente continua con devanado en serie.
Aprenda más sobre este tipo de motor aquí.
4.c) Motores de corriente continua sin escobillas:
4.c.1 ) Motor paso a paso
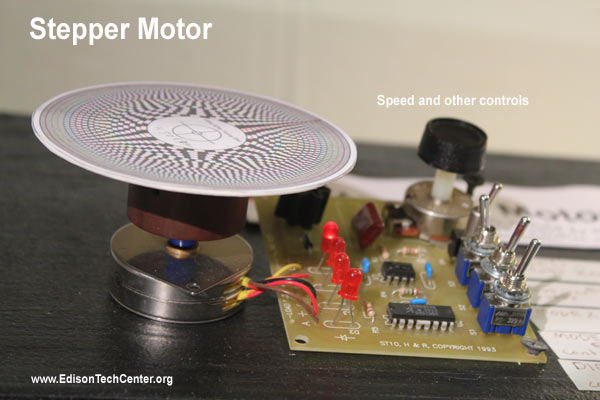
El motor paso a paso es un tipo de motor sin escobillas que mueve el eje central una parte de vuelta cada vez. Para ello se utilizan electroimanes dentados alrededor de una pieza de hierro en forma de engranaje centralizado. Hay muchos tipos de motores paso a paso. Se utilizan en sistemas que mueven objetos a una posición precisa, como un escáner, una unidad de disco y dispositivos industriales de tallado láser.
Vea el vídeo del motor paso a paso en acción a continuación:
4.c.2) Motores de corriente continua sin núcleo / sin hierro
El núcleo de cobre o aluminio enrollado gira alrededor de un imán sin el uso de hierro. Esto se hace haciendo una forma cilíndrica.
Ventaja: ligero y rápido para empezar a girar (utilizado en los discos duros de los ordenadores)
Desventaja: se sobrecalienta fácilmente ya que el hierro normalmente actúa como disipador de calor, necesita un ventilador para mantenerse fresco.
Aprende más sobre este tipo de motor aquí.