|
.
|
Le moteur électrique a été mis au point dans les années 1830, 30 ans après la première batterie. Il est intéressant de noter que le moteur a été développé avant la première dynamo ou le premier générateur.
|
|
1.) Histoire et inventeurs :1834 – Thomas Davenport, du Vermont, met au point le premier vrai moteur électrique ( » vrai » signifiant assez puissant pour accomplir une tâche) bien que Joseph Henry et Michael Faraday aient créé les premiers dispositifs de mouvement utilisant des champs électromagnétiques. Les premiers « moteurs » créaient des disques ou des leviers tournants qui se balançaient d’avant en arrière. Ces dispositifs ne pouvaient pas faire de travail pour l’homme, mais ils étaient importants pour ouvrir la voie à de meilleurs moteurs dans le futur. Les différents moteurs de Davenport étaient capables de faire fonctionner un modèle de chariot sur une piste circulaire et d’effectuer d’autres tâches. Le chariot s’est avéré être la première application importante de l’énergie électrique (ce n’était pas l’ampoule électrique). Des trolleys électriques rudimentaires de taille réelle ont finalement été construits 30 ans après la mort de Davenport dans les années 1850. Il faut attendre 1873 pour que le moteur électrique connaisse enfin un succès commercial. Depuis les années 1830, des milliers d’ingénieurs pionniers ont amélioré les moteurs et créé de nombreuses variantes. Voir les autres pages pour plus de détails sur la vaste histoire du moteur électrique. |

Le moteur mène au générateur :
Après que de faibles moteurs électriques aient été développés par Faraday et Henry, un autre pionnier du nom d’Hippolyte Pixii a compris qu’en faisant tourner le moteur à l’envers, il pouvait créer des impulsions d’électricité. Dans les années 1860, des générateurs puissants étaient mis au point. L’industrie électrique ne pouvait pas commencer avant le développement des générateurs, car les batteries n’étaient pas un moyen économique d’alimenter les besoins de la société. Lisez sur les générateurs et les dynamos ici >
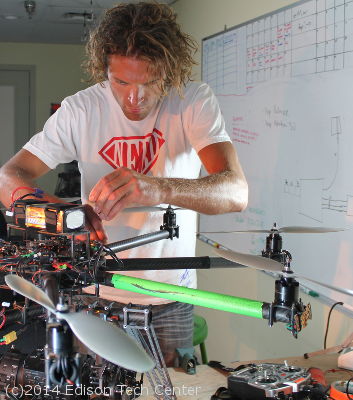
2.) Comment fonctionnent les moteursLes moteurs électriques peuvent être alimentés par du courant alternatif (CA) ou du courant continu (CC). Les moteurs à courant continu ont été développés en premier et présentent certains avantages et inconvénients. Chaque type de moteur fonctionne différemment mais ils utilisent tous la puissance du champ électromagnétique. Nous allons parler des principes très fondamentaux des champs électromagnétiques dans les moteurs avant de pouvoir passer aux différents types de moteurs. Les moteurs électriques à courant alternatif utilisent un enroulement secondaire et primaire (aimant), le primaire est relié au réseau électrique alternatif (ou directement à un générateur) et est alimenté en énergie. Le secondaire reçoit l’énergie du primaire sans le toucher directement. Cela se fait en utilisant le phénomène complexe connu sous le nom d’induction. À droite : un ingénieur travaille sur des modifications personnalisées d’un drone octocoptère. Huit minuscules moteurs à courant continu créent suffisamment de puissance pour soulever des kilos de charge utile. Des conceptions de moteurs plus récentes comme celle-ci utilisent des métaux de terres rares dans le stator pour créer des champs magnétiques plus puissants dans des ensembles plus petits et plus légers. |
 |
 |
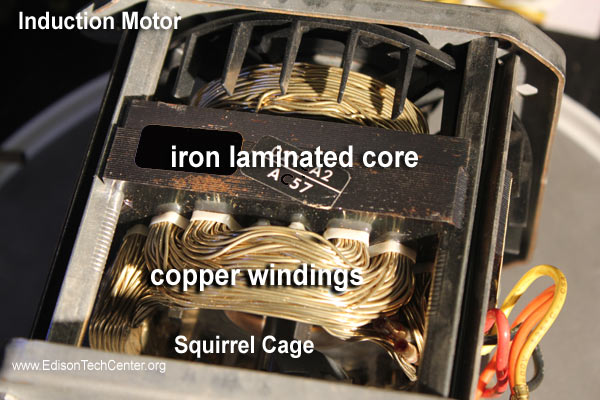 |
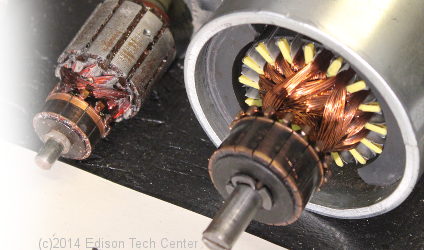
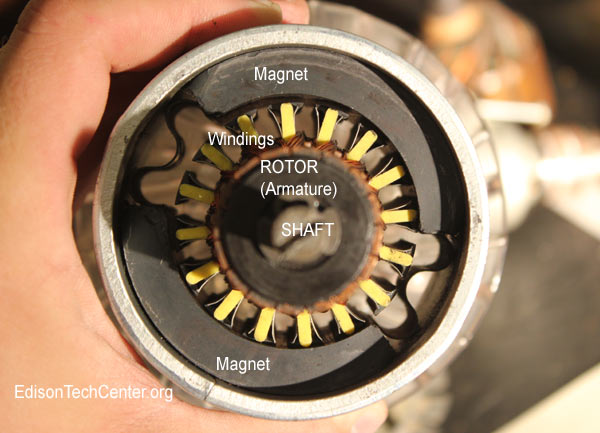
| En haut : un moteur universel que l’on trouve généralement dans la plupart des outils électriques. Il est doté d’un rotor dense et lourd. | Au-dessus : le moteur à induction peut avoir une « cage d’écureuil » ou une bobine rotative creuse ou un induit lourd. |
2.a) Pièces d’un moteur électrique :
Il existe de nombreuses sortes de moteurs électriques mais en général, ils ont quelques pièces similaires. Chaque moteur possède un stator, qui peut être un aimant permanent (comme sur le » moteur universel » ci-dessus) ou des fils isolés enroulés (un électroaimant comme sur la photo ci-dessus à droite). Le rotor se trouve au milieu (la plupart du temps), et est soumis au champ magnétique créé par le stator. Le rotor tourne car ses pôles sont attirés et repoussés par les pôles du stator. Regardez notre vidéo ci-dessous qui montre comment cela fonctionne. Cette vidéo porte sur un moteur CC sans balais où le rotor est à l’extérieur. Dans d’autres moteurs, le même principe est inversé, avec les électroaimants à l’extérieur. Vidéo (1 minute) :
La force d’un moteur :
La puissance du moteur (couple) est déterminée par la tension et la longueur du fil d’un électroaimant dans le stator, plus le fil est long (ce qui signifie plus de bobines dans le stator), plus le champ magnétique est fort. Cela signifie plus de puissance pour faire tourner le rotor. Consultez notre vidéo qui s’applique à la fois aux générateurs et aux moteurs pour en savoir plus.
Armature – la partie tournante du moteur – on l’appelait autrefois rotor, elle supporte les bobines de cuivre en rotation. Sur la photo ci-dessous, vous ne voyez pas les bobines car elles sont étroitement repliées dans l’induit. Un carter lisse protège les bobines des dommages.
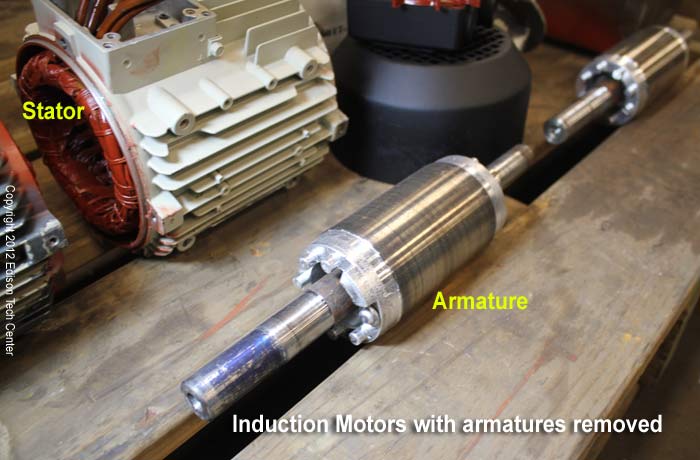
Stator – Le carter et les bobines qui constituent l’extérieur du moteur. Le stator crée un champ magnétique stationnaire.

Supérieur : quatre bobines distinctes sont clairement visibles dans ce stator (l’induit a été retiré)
Enroulement ou » bobine » – fils de cuivre enroulés autour d’un noyau pour être utilisés pour créer ou recevoir de l’énergie électromagnétique.
Les fils utilisés dans les enroulements DOIVENT être isolés. Sur certaines photos, vous verrez ce qui ressemble à des enroulements de fils de cuivre nus, ce n’est pas le cas, c’est simplement un émaillage avec un revêtement transparent.
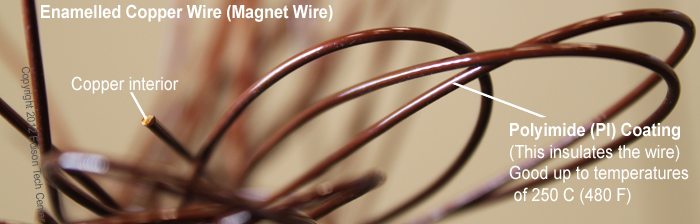
Le cuivre est le matériau le plus courant pour les enroulements. L’aluminium est également utilisé mais doit être plus épais pour transporter la même charge électrique en toute sécurité. Les enroulements en cuivre permettent d’avoir un moteur de plus petite taille. En savoir plus sur le cuivre >
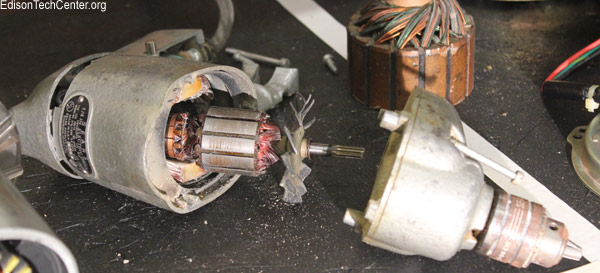
Combustion d’un moteur, dépannage:
Si un moteur fonctionne trop longtemps ou à une charge excessive, il peut « brûler ». Cela signifie que la température élevée a provoqué la rupture ou la fonte de l’isolation des enroulements, ceux-ci se court-circuitent alors lorsqu’ils se touchent et le moteur est endommagé. Vous pouvez également brûler un moteur en lui appliquant une tension supérieure à celle pour laquelle les fils de l’enroulement sont prévus. Dans ce cas, le fil fond au point le plus faible, ce qui coupe la connexion. Vous pouvez tester un moteur pour voir s’il a brûlé de cette façon en testant les Ohms (résistance) sur un multimètre. En général, vous voulez chercher des marques noires dans les enroulements lorsque vous vérifiez un moteur.
Cage d’écureuil – la deuxième bobine dans un moteur à induction, voir ci-dessous pour voir comment cela fonctionne
Induction – la génération de la force électromotrice dans un circuit fermé par un flux magnétique variable à travers le circuit. Dans le cas du courant alternatif, le niveau de puissance monte et descend, ce qui charge l’enroulement pendant un moment en créant un champ magnétique. Lorsque la puissance diminue au cours du cycle, le champ magnétique ne peut être maintenu et s’effondre. Cette action transfère la puissance à travers le magnétisme dans l’autre enroulement ou bobine. APPRENDRE PLUS sur l’induction ici.
3.) Types de moteurs électriques à courant alternatif
Moteurs à courant alternatif (CA):
3.a) Moteur à induction
3.b) Moteur universel (peut utiliser du courant continu ou alternatif)
3.c) Moteurs synchrones
3.d) Moteurs à bague de déphasage
3.a) Moteur à induction

Voir notre page consacrée au moteur à induction ici >
3.b) Moteur universel

C’est un moteur puissant qui peut être utilisé aussi bien en courant alternatif qu’en courant continu.
Avantages :
-Couple de démarrage élevé, et petite taille (bon pour là utilisation courante dans les outils électriques grand public)
-Peut fonctionner à des vitesses élevées (idéal pour les machines à laver et les perceuses électriques)
Inconvénients :
-Les balais s’usent avec le temps
Utilisations : appareils électroménagers, outils électriques portatifs
Voir la vidéo ci-dessous :
3.c) Moteurs synchrones (moteur Selsyn)
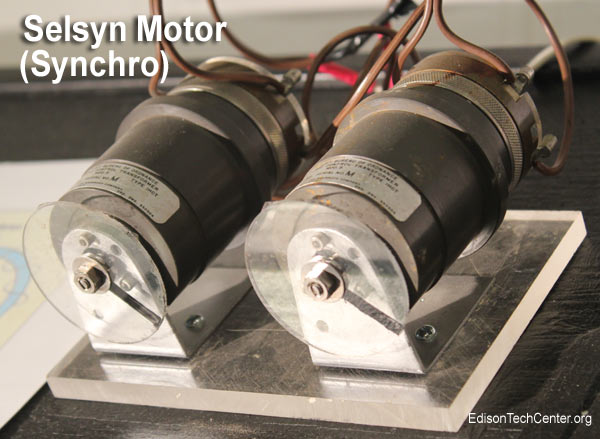
Ce moteur est similaire au moteur à induction, sauf qu’il se déplace à la fréquence de ligne.
Le moteur Selsyn a été développé en 1925 et est maintenant connu sous le nom de Synchro. Apprenez-en plus à leur sujet ici.
Avantages : Il fournit une vitesse régulière qui est déterminée par le nombre de pôles et la fréquence du courant alternatif fourni.
Désavantages : Ne peut pas gérer un couple variable, ce moteur s’arrêtera ou « tirera » à un couple donné.
Utilisations : une horloge utilise des moteurs synchrones pour fournir une vitesse de rotation précise pour les aiguilles. Il s’agit d’un moteur analogique et bien que la vitesse soit précise, le moteur pas à pas serait plus adapté pour travailler avec des ordinateurs car il fonctionne sur des « pas » rigides d’un tour.
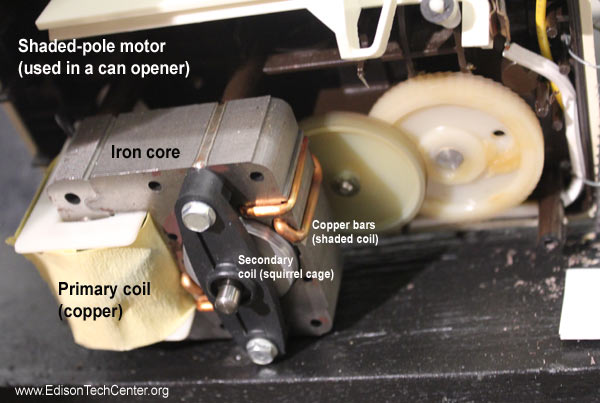
3.d) Moteur à bague de déphasage
 |
|
Avantages : atteint un fort niveau de couple une fois que le rotor a commencé à tourner rapidement.
Utilisé dans les ventilateurs, les appareils
Inconvénients : lent à démarrer, faible couple au démarrage. Utilisé dans les ventilateurs, remarquez le démarrage lent des ventilateurs.
Ce moteur est également utilisé dans les drains de machines à laver, les ouvre-boîtes et d’autres appareils ménagers.
D’autres types de moteurs fonctionnent mieux pour des besoins plus puissants au-dessus de 125 watts.
Voir la vidéo ci-dessous :
4.) Moteurs à courant continu (CC) :
Les moteurs à courant continu ont été le premier type de moteur électrique. Ils ont généralement un rendement de 75 à 80 %. Ils fonctionnent bien à des vitesses variables et ont un grand couple.
4.a) Informations générales
4.b) Moteurs à courant continu à balais
4.b.1) Moteur à enroulement en dérivation à courant continu
4.b.2) Moteur à enroulement en série à courant continu
4.b.3) Moteurs à crêpes
4.b.4) Moteur à courant continu à aimants permanents
4.b.5.) Excitation séparée (Sepex)
4.c) Moteurs à courant continu sans balais
4.c.1) Moteur pas à pas
4.c.2) Moteurs à courant continu sans noyau / sans fer
Moteurs à courant continu à balais:
Les premiers moteurs à courant continu utilisaient des balais pour transférer le courant à l’autre côté du moteur. Le balai est nommé ainsi car il a d’abord ressemblé à une forme de balai. Les petites fibres métalliques frottaient contre une partie rotative du moteur pour maintenir un contact constant. Le problème des balais est qu’ils s’usent avec le temps en raison de la mécanique. Les brosses créaient des étincelles en raison de la friction. Les parcs faisaient souvent fondre l’isolation et provoquaient des courts-circuits dans l’induit, voire faisaient fondre le collecteur.
Les premiers moteurs étaient utilisés sur les chemins de fer urbains.
Utilise un collecteur à anneau fendu avec des balais.
Avantages :
-Utilisé dans une myriade d’applications, a un contrôle de vitesse facile en utilisant le niveau de tension à contrôler.
-A un couple de démarrage élevé (un démarrage puissant)
Limitations : les balais créent des frictions et des étincelles, cela peut surchauffer le dispositif et faire fondre/brûler les balais, donc la vitesse de rotation maximale est limitée. Les étincelles provoquent également des interférences radioélectriques. (RFI)
Il existe cinq types de moteurs CC à balais :
Moteur CC à enroulement shunt
Moteur CC à enroulement en série
Moteur CC composé – composé cumulatif et composé différentiel
Moteur CC à aimant permanent
Moteur à excitation séparée
Moteur crêpe
Moteurs CC sans balais :
La brosse est remplacée par un interrupteur électrique externe qui est synchronisé avec la position du moteur (il inversera la polarité au besoin pour que l’arbre du moteur continue de tourner dans un sens)
-Plus efficace que les moteurs à brosse
-Utilisé lorsque le contrôle de la vitesse doit être précis (comme dans les lecteurs de disques, les machines à bande, les voitures électriques, etc.)
-Longue durée de vie puisque fonctionne à une température plus froide et qu’il n’y a pas de balais à user.
Types de moteurs à courant continu sans balais :
Moteur pas à pas
Moteurs à courant continu sans noyau / sans fer
4.b) MOTEURS À COURANT CONTINU BRUSHÉ:
4.b.1) Moteur à courant continu à enroulement shunt
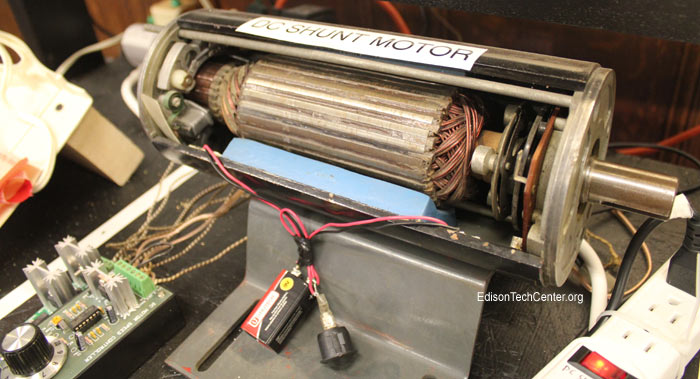
Le moteur à courant continu à enroulement shunt est câblé de telle sorte que la bobine d’excitation est connectée en parallèle avec l’induit. Les deux enroulements reçoivent la même tension. La bobine de champ shunt est enroulée avec de nombreux tours de fil fin pour créer une résistance élevée. Cela garantit que la bobine d’excitation consommera moins de courant que l’induit (rotor).
L’induit (vu ci-dessus, c’est la longue et grosse partie cylindrique qui tourne) a des fils de cuivre épais, c’est pour que beaucoup de courant puisse le traverser pour faire démarrer le moteur.
Lorsque l’induit tourne (voir photo ci-dessous), le courant est limité par la force contre-électromotrice.
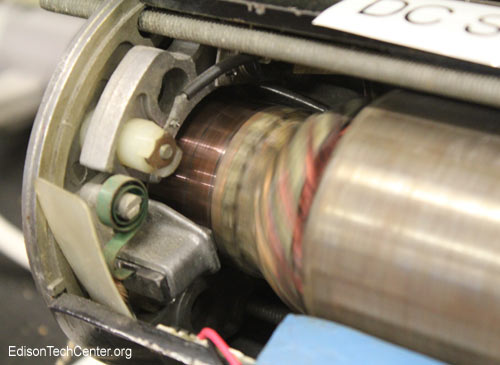
La force de la bobine de champ shunt détermine la vitesse et le couple du moteur.
Avantages : Le moteur shunt à courant continu régule sa propre vitesse. Cela signifie que si une charge est ajoutée, l’armature ralentit, la CEMF diminue, ce qui entraîne une augmentation du courant d’armature. Il en résulte une augmentation du couple qui aide à déplacer la charge lourde. Lorsque la charge est retirée, l’armature accélère, la CEMF augmente ce qui limite le courant et le couple diminue.
L’exemple de la bande transporteuse : Imaginez une bande transporteuse se déplaçant à une vitesse donnée, puis une boîte lourde entre dans la bande. Ce type de moteur permettra à la bande de se déplacer à une vitesse constante, quel que soit le nombre de boîtes qui se déplacent sur la bande.
Voyez la vidéo ci-dessous d’un moteur shunt à courant continu en action !:
4.b.2) Moteur à courant continu à enroulement en série
Le moteur à enroulement en série est un moteur à courant continu de type auto-excité. L’enroulement de champ est connecté intérieurement en série à l’enroulement du rotor. L’enroulement de champ dans le stator est ainsi exposé à la totalité du courant généré par l’enroulement du rotor.
Ce type de moteur ressemble à un moteur DC à enroulement shunt, sauf que les enroulements de champ sont constitués d’un fil plus lourd afin qu’il puisse supporter les courants plus élevés.
Utilisations : Ce type de moteur est utilisé dans l’industrie comme moteur de démarrage en raison d’un grand couple.
En savoir plus sur le moteur à enroulement en série :
Article 1
Article 2
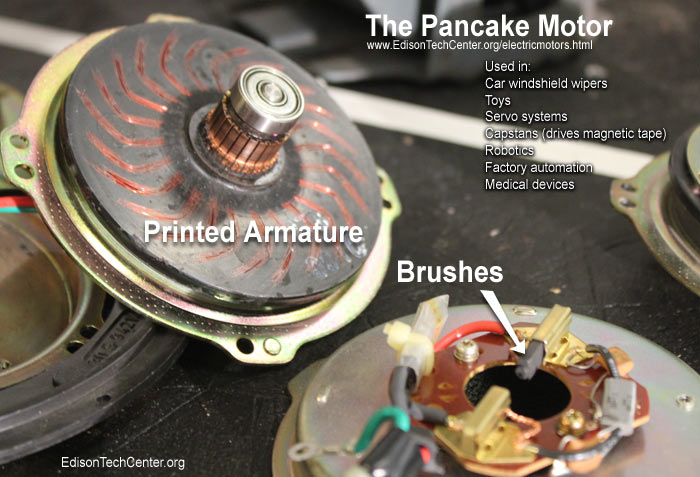
4.b.3) Moteur à courant continu à crêpe (alias moteur à armature imprimée)

Le moteur à crêpe est un moteur sans fer. La plupart des moteurs ont un enroulement en cuivre autour d’un noyau en fer.
Vidéo montrant des exemples de moteurs pancake :
Avantages :
Contrôle exact de la vitesse, profil plat, n’a pas de cogging qui est causé par le fer dans un électroaimant
Inconvénients :
la forme plate n’est pas bonne pour toutes les applications
Il a un enroulement façonné dans un disque plat en époxy entre deux aimants à haut flux. Il est totalement sans fer, ce qui rend une grande efficacité. Utilisé dans les applications servo, a été d’abord conçu comme un moteur d’essuie-glace et l’industrie de la vidéo car il était très plat dans le profil et avait un bon contrôle de la vitesse. Les ordinateurs et les enregistrements vidéo/audio utilisant tous des bandes magnétiques, un contrôle précis et rapide de la vitesse était nécessaire ; le moteur pancake a donc été développé à cet effet. Aujourd’hui, il est utilisé dans une myriade d’autres applications, y compris la robotique et les servo-systèmes.
4.b.4) Moteur composé à courant continu (composé cumulatif et différentiel)
C’est un autre moteur auto-excité avec des bobines de champ en série et en dérivation. Il possède une régulation de vitesse efficace et un couple de démarrage décent.
En savoir plus sur ce type de moteur ici.
4.b.5) Moteur à courant continu à aimant permanent
Ce type de moteur fonctionne bien à haute vitesse et peut être très compact.
Utilisations : compresseurs, autres applications industrielles
En savoir plus sur ce type de moteur ici.
4.b.6) Excitation séparée (sepex)
Le SepEx possède un enroulement de champ qui est alimenté séparément de l’induit avec un signal de courant continu. L’aimant de champ a également sa propre alimentation en courant continu. En conséquence, vous verrez que ce type de moteur a quatre fils – 2 pour le champ et 2 pour l’armature.
Ce moteur est un moteur à courant continu à balais qui présente des courbes de couple plus larges qu’un moteur à courant continu à enroulement en série.
En savoir plus sur ce type de moteur ici.
4.c) Moteurs à courant continu sans balais :
4.c.1 ) Moteur pas à pas
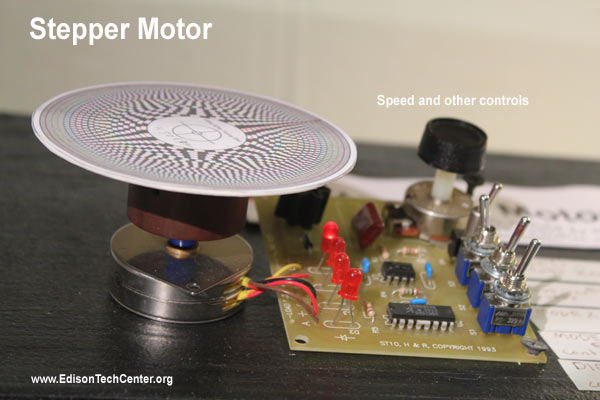
Le moteur pas à pas est un type de moteur sans balais qui déplace l’arbre central d’une partie de tour à la fois. Cela se fait à l’aide d’électroaimants dentés autour d’une pièce de fer centralisée en forme d’engrenage. Il existe de nombreux types de moteurs pas à pas. Ils sont utilisés dans des systèmes qui déplacent des objets à une position précise, comme un scanner, un lecteur de disque et des appareils de gravure laser industriels.
Voyez la vidéo du moteur pas à pas en action ci-dessous:
4.c.2) Moteurs à courant continu sans noyau / sans fer
Le noyau en cuivre ou en aluminium enroulé tourne autour d’un aimant sans utiliser de fer. Cela se fait en réalisant une forme de cylindre.
Avantage : léger et rapide pour commencer à tourner (utilisé dans les disques durs d’ordinateur)
Avantage : surchauffe facilement puisque le fer agit normalement comme un dissipateur de chaleur, il a besoin d’un ventilateur pour rester froid.
En savoir plus sur ce type de moteur ici.
.