|
 |
O motor eléctrico foi desenvolvido pela primeira vez na década de 1830, 30 anos após a primeira bateria. Curiosamente, o motor foi desenvolvido antes do primeiro dínamo ou gerador.
|
|
1). História e Inventores:1834 – Thomas Davenport de Vermont desenvolveu o primeiro motor eléctrico real (‘real’ significa suficientemente potente para fazer uma tarefa) embora Joseph Henry e Michael Faraday tenham criado dispositivos de movimento precoce usando campos electromagnéticos. Os primeiros “motores” criaram discos giratórios ou alavancas que balançavam para trás e para a frente. Estes dispositivos não podiam fazer qualquer trabalho para a humanidade, mas eram importantes para liderar o caminho para melhores motores no futuro. Os vários motores de Davenport eram capazes de fazer funcionar um carrinho modelo numa pista circular e outras tarefas. O carrinho revelou-se mais tarde a primeira aplicação importante de energia eléctrica (não era a lâmpada). Os tróleis eléctricos rudimentares de tamanho completo foram finalmente construídos 30 anos após a morte de Davenport na década de 1850. Só em 1873 é que o motor eléctrico alcançou finalmente o sucesso comercial. Desde a década de 1830 milhares de engenheiros pioneiros melhoraram os motores e criaram muitas variações. Ver outras páginas para mais detalhes sobre a vasta história do motor eléctrico. |

O motor conduz ao gerador:
Depois de motores eléctricos fracos terem sido desenvolvidos por Faraday e Henry, outro pioneiro inicial chamado Hippolyte Pixii descobriu que, ao fazer o motor andar para trás, podia criar impulsos de electricidade. Na década de 1860 estavam a ser desenvolvidos geradores potentes. A indústria eléctrica não podia começar até que os geradores fossem desenvolvidos, porque as baterias não eram uma forma económica de alimentar as necessidades da sociedade. Leia sobre geradores e dínamos aqui >
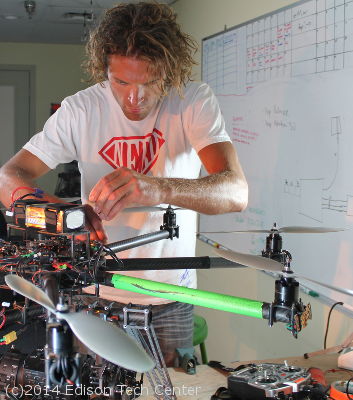
2). Como funcionam os motoresOs motores eléctricos podem ser alimentados por corrente alternada (CA) ou corrente contínua (CC). Os motores de corrente contínua foram desenvolvidos primeiro e têm certas vantagens e desvantagens. Cada tipo de motor funciona de forma diferente, mas todos eles utilizam a potência do campo electromagnético. Falaremos dos princípios básicos dos campos electromagnéticos nos motores antes de se poder passar aos diferentes tipos de motores. AC motores eléctricos utilizam um enrolamento secundário e primário (íman), o primário é ligado à corrente alternada (ou directamente a um gerador) e é energizado. O secundário recebe energia do primário sem lhe tocar directamente. Isto é feito utilizando os fenómenos complexos conhecidos como indução. Direita: um engenheiro trabalha em modificações personalizadas de um drone octocopter. Oito pequenos motores CC criam energia suficiente para levantar libras de carga útil. Novos desenhos de motores como este utilizam metais de terras raras no estator para criar campos magnéticos mais fortes em embalagens mais pequenas e mais leves. |
 |
 |
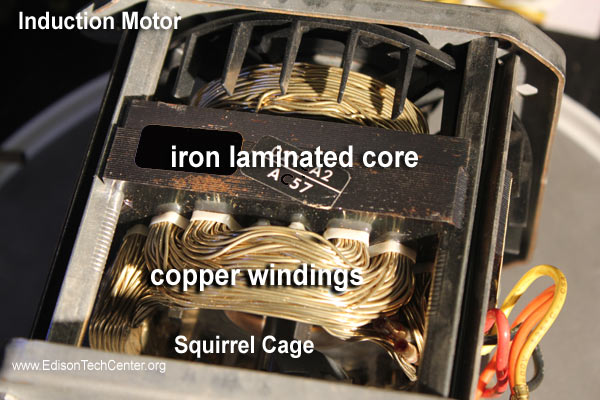
Acima: o motor de indução pode ter uma “gaiola de esquilo” ou uma bobina de rotação oca ou uma armadura pesada. |
2.a) Partes de um motor eléctrico:
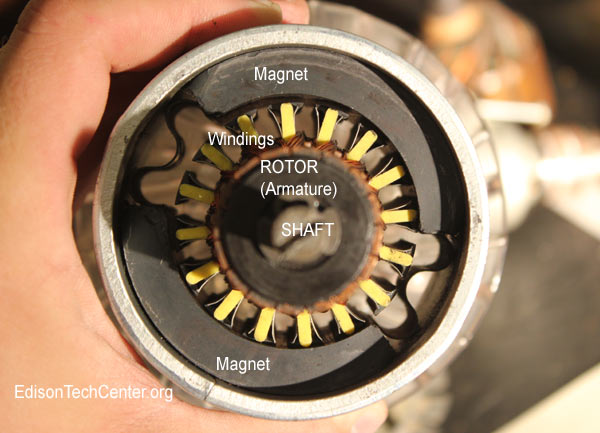
Há muitos tipos de motores eléctricos mas em geral têm algumas partes semelhantes. Cada motor tem um estator, que pode ser um íman permanente (como mostrado no ‘motor universal’ acima) ou fios insultados (um electroíman como na foto acima-direita). O rotor situa-se no meio (a maior parte do tempo), e está sujeito ao campo magnético criado pelo estator. O rotor gira à medida que os seus pólos são atraídos e repelidos pelos pólos do estator. Veja o nosso vídeo abaixo mostrando como funciona. Este vídeo cobre um motor CC sem escovas em que o rotor está no exterior, noutros motores o mesmo princípio está em marcha atrás, com os electroímanes no exterior. Vídeo (1 minuto):
Força de um motor:
A força do motor (torque) é determinada pela voltagem e o comprimento do fio num electroíman no estator, quanto mais longo for o fio (o que significa mais bobinas no estator) mais forte será o campo magnético. Isto significa mais potência para rodar o rotor. Veja o nosso vídeo que se aplica tanto a geradores como a motores para saber mais.
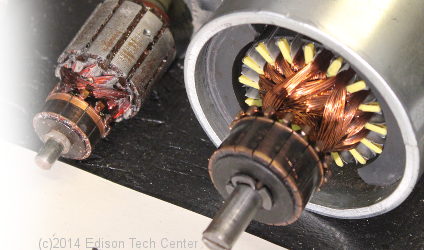
Armatura – a parte rotativa do motor – isto costumava ser chamado rotor, suporta as bobinas de cobre rotativas. Na foto abaixo não se vêem as bobinas porque estão bem enfiadas na armadura. Uma carcaça lisa protege as bobinas de danos.
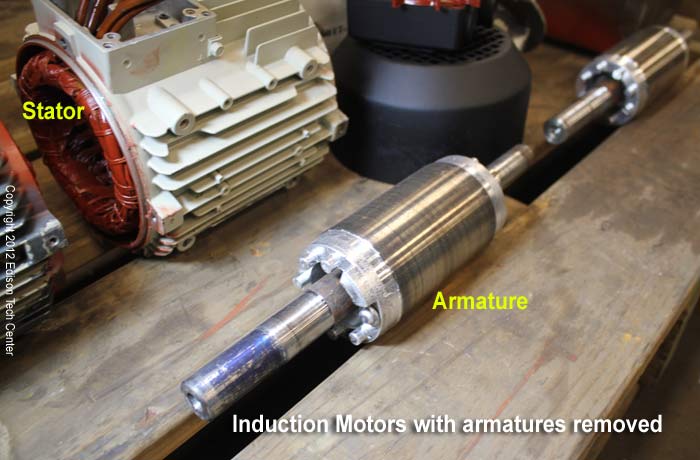
Estator – A carcaça e as bobinas que compõem o exterior do motor. O estator cria um campo magnético estacionário.

Acima: quatro bobinas distintas são claramente vistas neste estator (a armadura foi removida)
Bobina ou “Bobina” – fios de cobre enrolados em torno de um núcleo a ser utilizado para criar ou receber energia electromagnética.
Os fios utilizados nos enrolamentos DEVEM ser isolados. Em algumas fotos verá o que parece ser enrolamentos de fios de cobre nus, não é, é simplesmente um esmaltado com um revestimento transparente.
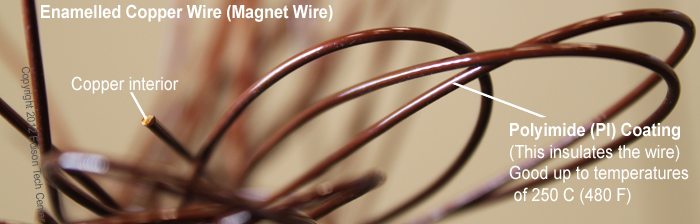
Cobre é o material mais comum para enrolamentos. O alumínio é também utilizado mas deve ser mais espesso para transportar a mesma carga eléctrica com segurança. Os enrolamentos de cobre permitem um motor de menor tamanho. Mais sobre Cobre >
Burning out a motor, troubleshooting:
Se um motor for operado durante demasiado tempo ou com carga excessiva, pode “queimar”. Isto significa que a alta temperatura fez com que o isolamento do enrolamento se avariasse ou derretesse, que os enrolamentos se tornassem curtos quando se tocam e que o motor fosse danificado. Também se pode queimar um motor colocando mais voltagem no mesmo do que os fios do enrolamento estão classificados. Nesse caso, o fio derreterá no ponto mais fraco, cortando a ligação. Pode testar um motor para ver se este se queimou desta forma, testando para Ohms (resistência) num multi-metro. Em geral pretende procurar marcas negras nos enrolamentos ao verificar um motor.
br>Gaiola de esquilo – a segunda bobina num motor de indução, ver abaixo para ver como funciona
Indução – a geração de força electromotriz num circuito fechado por um fluxo magnético variável através do circuito. Em corrente alternada, o nível de potência sobe e desce, isto carrega o enrolamento por um momento, criando um campo magnético. Quando a potência cai no ciclo, o campo magnético não pode ser sustentado e colapsa. Esta acção transfere a energia através da magnetização para o outro enrolamento ou bobina. APRENDA MAIS sobre indução aqui.
3). Tipos de Motores Eléctricos CA
Motores de Corrente Alternada (CA):
3.a) Motor de Indução
3.b) Motor Universal (pode usar corrente contínua ou CA)
3.c) Motores Síncronos
3.d) Motores de Pó Sombreado
br>
3>3.a) Motor de Indução

Ver a nossa página dedicado ao Motor de Indução aqui >
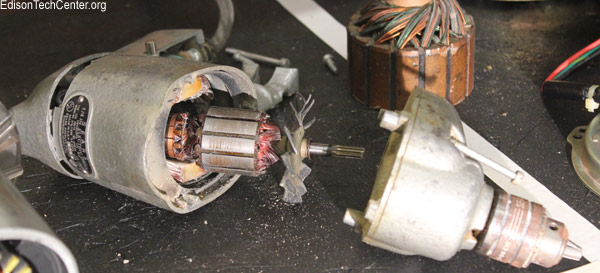
3>3.b) Motor Universal

Este é um motor potente que pode ser utilizado tanto com energia CA como CC.
P>Vantagens:
Um elevado binário de arranque, e pequeno tamanho (bom para o uso comum em ferramentas eléctricas de consumo)
-Pode funcionar a alta velocidade (óptimo para máquinas de lavar e berbequins eléctricos)
Desvantagens:
-Os pinos desgastar-se-ão com o tempo
-Usos: aparelhos, ferramentas eléctricas manuais
 p>Ver o vídeo abaixo:
p>Ver o vídeo abaixo:
br>>>>br>>>
3.c) Motores Síncronos (Selsyn Motor)
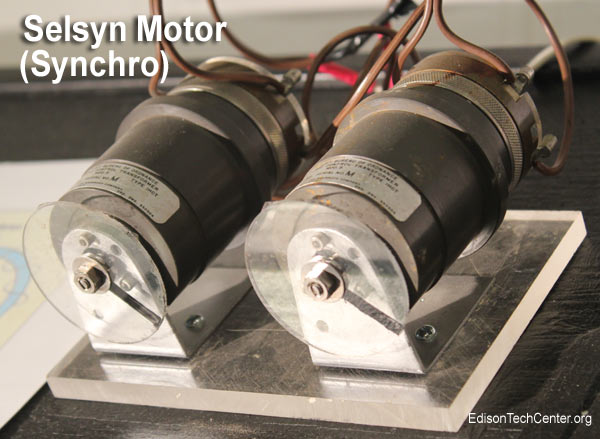
Este motor é semelhante ao motor de indução excepto que se move com frequência de linha.
O Selsyn Motor foi desenvolvido em 1925 e é agora conhecido como Synchro. Saiba mais sobre eles aqui.
br>Vantagens: Fornece uma velocidade constante que é determinada pelo número de pólos e pela frequência de potência CA fornecida.
Desvantagens: Não pode suportar torque variável, este motor pára ou “puxa” a um determinado torque.
Usos: um relógio utiliza motores síncronos para fornecer uma velocidade de rotação precisa para os ponteiros. Este é um motor analógico e embora a velocidade seja precisa, o motor passo-a-passo seria melhor para trabalhar com computadores, uma vez que funciona em “passos” rígidos de uma volta.
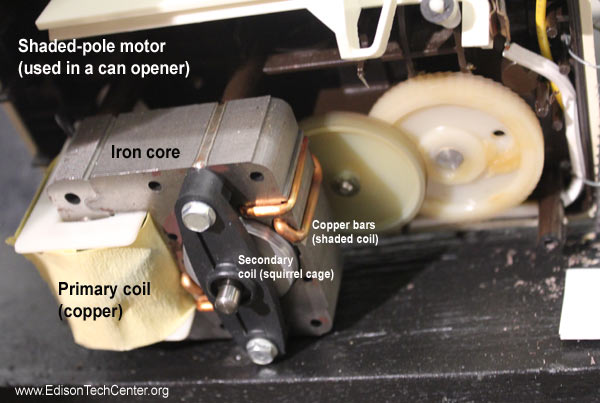
3.d) Shaded-Pole Motor
 |
|
br>Vantagens: atinge um forte nível de torque uma vez que o rotor começou a girar rapidamente.
Utilizado em ventiladores, aparelhos
Desvantagens: arranque lento, baixo torque para arrancar. Utilizado em ventiladores, notar o arranque lento dos ventiladores.
Este motor é também utilizado em lavadores de roupa, abre-latas, e outros aparelhos domésticos.
Outros tipos de motores funcionam melhor para necessidades mais potentes acima dos 125 watts.
 p>>p>Ver o vídeo abaixo:
p>>p>Ver o vídeo abaixo:
p>>br>>>>br>>>
br>
br>
4). Motores de Corrente Contínua (DC):
Motores de corrente contínua foram o primeiro tipo de motor eléctrico. São tipicamente 75-80% eficientes. Funcionam bem a velocidades variáveis e têm um grande binário.
4.a) Informações gerais
4.b) Motores de corrente contínua escovada
4.b.1) Motor de corrente contínua de derivação enrolada
4.b.2) Motor de corrente contínua enrolada
4.b.3) Motores Pancake
4.b.4) Motor de corrente contínua de íman permanente
4.b.5) Separately Excited (Sepex)
4.c) Brushless DC Motors
4.c.1) Stepper Motor
4.c.2) Coreless / Ironless DC Motors
br> Motores DC Brushed DC:
Os primeiros motores DC usavam escovas para transferir corrente para o outro lado do motor. O nome da escova é dado porque primeiro se assemelhava a uma forma semelhante a uma vassoura. As pequenas fibras de metal esfregadas contra uma parte rotativa do motor para manter um contacto constante. O problema com as escovas é que elas se desgastam com o tempo devido à mecânica. As escovas iriam criar faíscas devido ao atrito. Os parques derretiam frequentemente o isolamento e causavam calções na armadura e até derretiam o comutador.
Os primeiros motores eram utilizados nos caminhos-de-ferro de rua.
Utiliza um comutador de anel dividido com escovas.
Vantagens:
– Utilizado numa miríade de aplicações, tem fácil controlo de velocidade utilizando o nível de voltagem a controlar.
-Tem um elevado binário de arranque (um arranque potente)
Limitações: as escovas criam fricção e faíscas, isto pode sobreaquecer o dispositivo e derreter/queimar as escovas, por isso a velocidade máxima de rotação é limitada. As faíscas também causam interferência de radiofrequência. (RFI)
p>Existem cinco tipos de motores CC com escovas:
DC Shunt Wound Motor
DC Series Wound Motor
DC motor composto – Composto cumulativo e Diferencialmente Composto
Motor CC de íman permanente
Separately Excited
Motor de penetração p> Motores CC sem escovas:
A escova é substituída por um interruptor eléctrico externo que é sincronizado com a posição do motor (inverterá a polaridade conforme necessário para manter o eixo do motor a girar numa direcção)
-Mais eficiente do que os motores com escova
-Usado quando o controlo de velocidade tem de ser preciso (tais como em unidades de disco, máquinas de fita adesiva, carros eléctricos, etc.)
-Longa duração desde que funciona a uma temperatura mais fria e não há escovas para desgastar.
p>Tipos de motores CC sem escovas:
Motores CC sem escovas
Motores CC sem núcleo / sem ferro
>h3>4.b) MOTORES CC BRUHED:h3>4.b.1) Motor DC Shunt-wound Motor
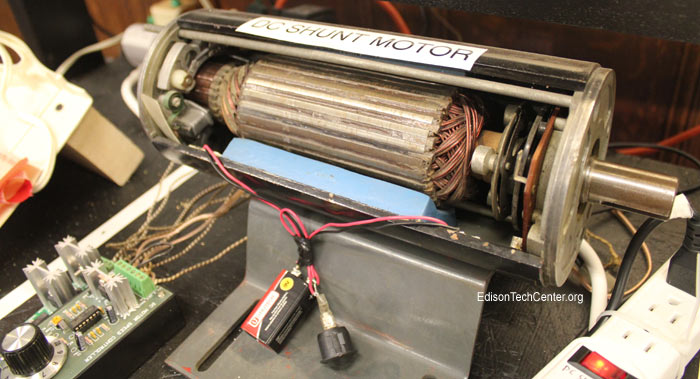
O motor DC Shunt é ligado de modo a que a bobina de campo seja ligada em paralelo com a armadura. Ambos os enrolamentos recebem a mesma tensão. A bobina de campo de derivação é enrolada com muitas voltas de fio fino para criar uma alta resistência. Isto assegura que a bobina de campo irá absorver menos corrente do que a armadura (rotor).
A armadura (vista acima, é a parte cilíndrica giratória longa e gorda) tem fios de cobre espessos, isto é, de modo a que muita corrente possa passar através dela para pôr o motor a trabalhar.
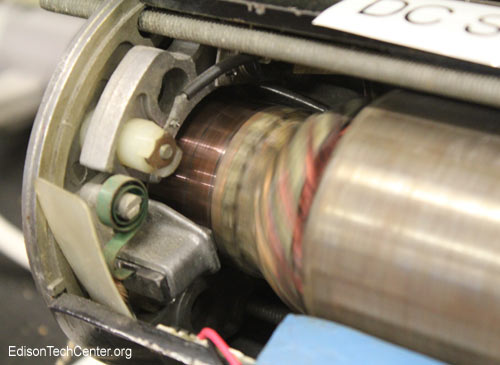
Quando a armadura gira (ver foto abaixo) a corrente é limitada pela força contra-electromotiva.
A força da bobina do campo de derivação determina a velocidade e o binário do motor.
Vantagens: O motor de derivação DC regula a sua própria velocidade. Isto significa que se for adicionada carga a armadura abranda, a CEMF diminui, o que resulta no aumento da corrente de armadura. Isto resulta num aumento do torque que ajuda a mover a carga pesada. Quando a carga é removida a armadura acelera, a CEMF aumenta, o que limita a corrente e o binário diminui.
O exemplo da correia transportadora: Imagine uma correia transportadora movendo-se a uma dada velocidade, depois uma caixa pesada entra na correia. Este tipo de motor manterá a correia em movimento a uma velocidade constante, independentemente da quantidade de caixas que se movimentam na correia.
Ver o vídeo abaixo de um motor de derivação DC em acção!:
4.b.2) Motor de derivação DC
O motor de derivação DC em série é um motor dc do tipo auto-excitado. O bobinado de campo é ligado internamente em série ao bobinado do rotor. O enrolamento do campo no estator é assim exposto à corrente total gerada pelo enrolamento do rotor.
Este tipo de motor é semelhante a um motor de derivação DC, excepto que os enrolamentos do campo são feitos de um fio mais pesado para que possa suportar as correntes mais altas.
Usos: Este tipo de motor é utilizado na indústria como motor de arranque devido ao grande torque.
Saiba mais sobre o motor enrolado em série:
Artigo 1
Artigo 2
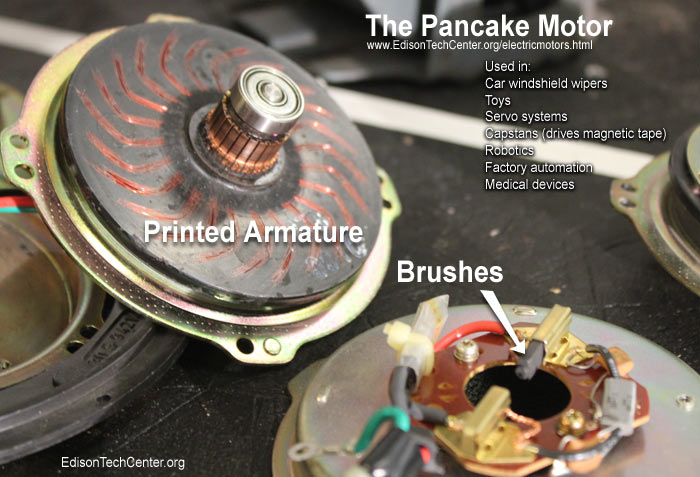
4.b.3) Motor Panqueca DC (também conhecido por Motor de Armadura Impresso)

O motor panqueca é um motor sem ferro. A maioria dos motores tem um enrolamento de cobre à volta de um núcleo de ferro.
Video mostrando exemplos de motor panqueca:
Vantagens:
Controlo de velocidade exacto, perfil plano, não tem engrenagem que é causada pelo ferro num electroíman
Desvantagens:
A forma plana não é boa para todas as aplicações
p>Tem uma forma de enrolamento num disco epoxi plano entre dois ímanes de alto fluxo. É totalmente sem ferro, o que faz uma grande eficiência. Utilizado em aplicações servo, foi inicialmente concebido como um motor limpa pára-brisas e na indústria do vídeo, uma vez que era muito plano no perfil e tinha um bom controlo de velocidade. Os computadores e a gravação de vídeo/áudio eram todos de fita magnética, pelo que foi necessário um controlo de velocidade preciso e rápido, pelo que o motor pancake foi desenvolvido para o efeito. Hoje em dia é utilizado numa miríade de outras aplicações, incluindo robótica e sistemas servo.
br>>>>h3> 4.b.4) Motor composto DC (Acumulado e Diferencialmente Composto)
Este é outro motor auto-animado com bobinas de série e de campo de derivação. Tem uma regulação de velocidade eficiente e um binário de arranque decente.
Saiba mais sobre este tipo de motor aqui.
4.b.5) Motor CC de íman permanente
Este tipo de motor funciona bem a alta velocidade e pode ser muito compacto.
Usos: compressores, outras aplicações industriais
Saiba mais sobre este tipo de motor aqui.
4.b.6) Separadamente excitado (sepex)
O SepEx tem um enrolamento de campo que é alimentado separadamente da armadura com um sinal de corrente contínua. O íman de campo também tem a sua própria fonte de corrente contínua. Como resultado, verá que este tipo de motor tem quatro fios – 2 para o campo e 2 para a armadura.
Este motor é um motor dc escovado que tem curvas de torque mais largas do que um motor DC enrolado em série.
Saiba mais sobre este tipo de motor aqui.
br>
4.c) Motores DC sem escovas:
4.c.1 ) Stepper Motor
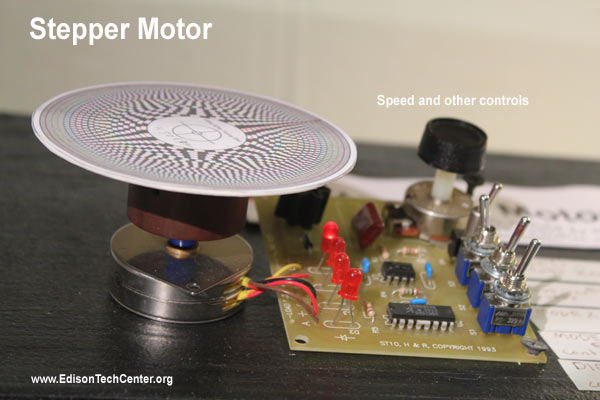
O motor passo-a-passo é um tipo de motor sem escovas que move o eixo central uma parte de uma volta de cada vez. Isto é feito utilizando electroímanes dentados em torno de uma peça de ferro em forma de engrenagem centralizada. Existem muitos tipos de motores passo-a-passo. São utilizados em sistemas que movem objectos para uma posição precisa, como um scanner, drive de disco, e dispositivos industriais de escultura a laser.
p>Ver o vídeo do motor passo-a-passo em acção abaixo:
4.c.2) Motores de corrente contínua sem fio / sem ferro
O núcleo de cobre ou alumínio enrolado roda em torno de um íman sem o uso de ferro. Isto é feito fazendo uma forma de cilindro.
Vantagem: leve e rápido para começar a girar (utilizado em discos rígidos de computador)
Desvantagem: sobreaquecimento fácil, uma vez que o ferro actua normalmente como dissipador de calor, necessita de um ventilador para se manter frio.
Saiba mais sobre este tipo de motor aqui.