Pompy są ogólnie pogrupowane w dwie szerokie kategorie – pompy wyporowe i pompy dynamiczne (odśrodkowe). Pompy wyporowe wykorzystują środki mechaniczne do zmiany wielkości (lub przemieszczania) komory cieczy w celu spowodowania przepływu cieczy. Z drugiej strony, pompy odśrodkowe nadają pęd cieczy poprzez obracanie wirników zanurzonych w cieczy. Moment pędu powoduje wzrost ciśnienia lub przepływu na wylocie pompy.
Pompy wyporowe mają charakterystykę stałego momentu obrotowego, natomiast pompy odśrodkowe wykazują charakterystykę zmiennego momentu obrotowego. W tym artykule omówione zostaną tylko pompy odśrodkowe.
Pompa odśrodkowa przekształca energię kierowcy w energię kinetyczną w cieczy poprzez przyspieszenie cieczy do zewnętrznej krawędzi wirnika. Ilość energii przekazanej cieczy odpowiada prędkości na krawędzi lub końcówce łopatki wirnika. Im szybciej obraca się wirnik lub im większy jest wirnik, tym większa jest prędkość cieczy na końcówce łopatki i tym większa jest energia przekazywana cieczy.
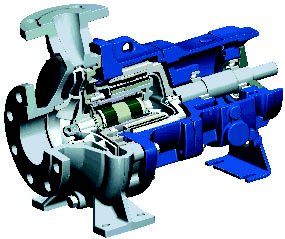
Figura 1. Pompa odśrodkowa
Charakterystyka
Wytworzenie oporu dla przepływu steruje energią kinetyczną cieczy wychodzącej z wirnika. Pierwszy opór jest tworzony przez wolutę (obudowę) pompy, która zatrzymuje ciecz i spowalnia ją. Gdy ciecz zwalnia w korpusie pompy, część energii kinetycznej jest zamieniana na energię ciśnienia. Jest to opór przepływu pompy, który jest odczytywany na manometrze podłączonym do przewodu tłocznego. Pompa nie wytwarza ciśnienia, wytwarza jedynie przepływ. Ciśnienie jest miarą oporu przepływu.
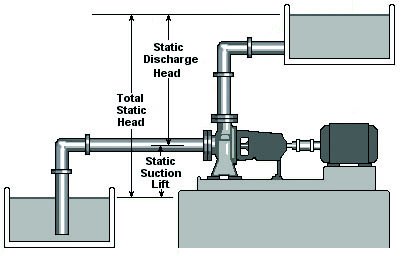
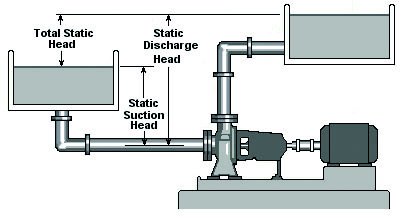
Rysunek 2. Przedstawienie statycznej wysokości tłoczenia, statycznej wysokości ssania i całkowitej wysokości statycznej
Słowa – opór przepływu
W cieczach newtonowskich (prawdziwych) (cieczach nielepkich, takich jak woda lub benzyna), termin głowa jest miarą energii kinetycznej, którą wytwarza pompa odśrodkowa. Wyobraźmy sobie rurę wystrzeliwującą strumień wody prosto w powietrze. Wysokość, jaką osiąga woda, to właśnie wysokość podnoszenia. Głowica mierzy wysokość słupa cieczy, który pompa może utworzyć w wyniku energii kinetycznej, jaką pompa odśrodkowa nadaje cieczy. Głównym powodem używania głowicy zamiast ciśnienia do pomiaru energii pompy odśrodkowej jest to, że ciśnienie z pompy zmieni się, jeśli zmieni się ciężar właściwy (waga) cieczy, ale głowica nie zmieni się. Użytkownicy końcowi mogą zawsze opisać wydajność pompy dla każdej cieczy newtonowskiej, niezależnie od tego, czy jest ona ciężka (kwas siarkowy) czy lekka (benzyna), używając wysokości podnoszenia. Głowica jest związana z prędkością, jaką ciecz uzyskuje podczas przechodzenia przez pompę.
Wszystkie formy energii zaangażowane w system przepływu cieczy można wyrazić w stopach cieczy. Suma tych głowic określa całkowitą głowicę układu lub pracę, jaką pompa musi wykonać w układzie. Różne rodzaje głowic – tarcia, prędkości i ciśnienia – zostały zdefiniowane w tej sekcji.
Głowa tarcia (hf)
Głowa tarcia to głowica wymagana do pokonania oporu przepływu w rurze i armaturze. Zależy ona od rozmiaru, stanu i typu rury; liczby i typu łączników rurowych; natężenia przepływu; oraz charakteru cieczy.
Głowa prędkości (hv)
Głowa prędkości to energia cieczy w wyniku jej ruchu z pewną prędkością (V). Jest to równoważna wysokość w stopach, przez którą woda musiałaby opaść, aby uzyskać tę samą prędkość lub, innymi słowy, wysokość niezbędna do przyspieszenia wody. Wysokość podnoszenia można obliczyć za pomocą następującego wzoru:

Gdzie:
g = 32,2 ft./sec.2
V = prędkość cieczy w ft./sec.
Głowa prędkości jest zwykle nieistotna i może być pominięta w większości systemów o dużej wysokości podnoszenia. Jednakże, może ona być dużym czynnikiem i musi być brana pod uwagę w systemach niskociśnieniowych.
Głowa ciśnieniowa
Głowa ciśnieniowa musi być brana pod uwagę, gdy system pompowy zaczyna się od lub opróżnia do zbiornika, który jest pod ciśnieniem innym niż atmosferyczne. Ciśnienie w takim zbiorniku musi być najpierw przeliczone na stopy cieczy. Podciśnienie w zbiorniku ssawnym lub dodatnie ciśnienie w zbiorniku tłocznym musi być dodane do wysokości podnoszenia systemu, podczas gdy dodatnie ciśnienie w zbiorniku ssawnym lub podciśnienie w zbiorniku tłocznym będzie odjęte. Poniżej podano wzór do przeliczania cali rtęciowych podciśnienia na stopy cieczy:

Różne rodzaje głowy są łączone w celu utworzenia całkowitej głowy systemu przy dowolnym natężeniu przepływu. Opisy w tym rozdziale dotyczą tych połączonych lub dynamicznych głowic, które mają zastosowanie do pompy odśrodkowej.
Całkowita dynamiczna siła ssąca (hs)
Całkowita dynamiczna siła ssąca to statyczna siła ssąca minus głowica prędkości na kołnierzu ssawnym pompy plus całkowita siła tarcia w linii ssawnej. Całkowita dynamiczna wysokość ssania, określona podczas testu pompy, jest odczytem manometru na kołnierzu ssawnym, przeliczonym na stopy cieczy i skorygowanym do linii środkowej pompy, minus głowica prędkości w punkcie zamocowania manometru.
Całkowita dynamiczna wysokość tłoczenia (hd)
Całkowita dynamiczna wysokość tłoczenia jest statyczną wysokością tłoczenia plus głowica prędkości przy kołnierzu tłocznym pompy plus całkowita wysokość głowicy ciernej w linii tłocznej. Całkowita dynamiczna wysokość podnoszenia, określona podczas testu pompy, jest odczytem manometru na kołnierzu tłocznym, przeliczonym na stopy cieczy i skorygowanym do linii środkowej pompy, plus wysokość podnoszenia w punkcie zamocowania manometru.
Określenia dotyczące pomp
Podnoszenie ssania występuje, gdy źródło zasilania znajduje się poniżej linii środkowej pompy. Dlatego statyczna wysokość ssania to odległość pionowa w stopach od linii środkowej pompy do swobodnego poziomu pompowanej cieczy.
Głośnik ssania występuje, gdy źródło zasilania znajduje się powyżej linii środkowej pompy. Dlatego statyczna głowica ssąca to odległość pionowa w stopach od linii środkowej pompy do swobodnego poziomu pompowanej cieczy.
Statyczna głowica tłocząca to odległość pionowa w stopach między linią środkową pompy a punktem swobodnego tłoczenia lub powierzchnią cieczy w zbiorniku tłocznym.
Całkowita głowica statyczna to odległość pionowa w stopach między swobodnym poziomem źródła zasilania a punktem swobodnego tłoczenia lub swobodną powierzchnią cieczy tłoczonej.
Głowa całkowita lub całkowita głowa dynamiczna
Głowa całkowita (H), lub całkowita głowa dynamiczna (TDH), to całkowita dynamiczna głowa tłoczna minus całkowita dynamiczna głowa ssąca:
TDH = hd + hs (z podnośnikiem ssącym)
TDH = hd – hs (z głowicą ssącą)
Moc
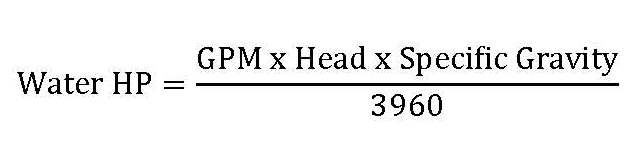
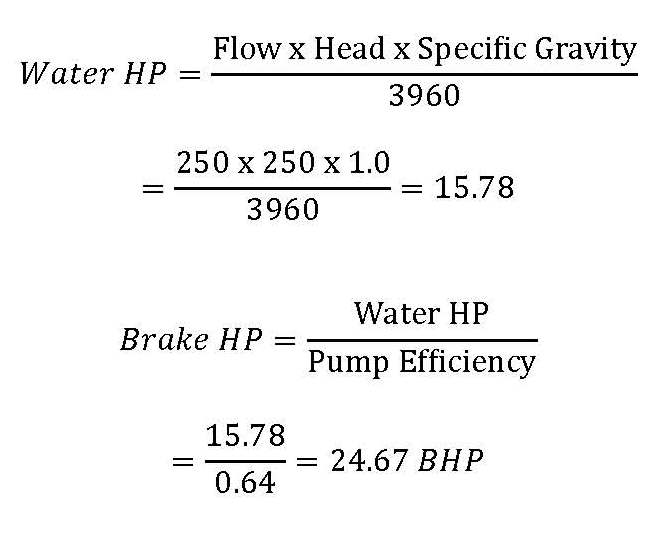
Praca wykonywana przez pompę odśrodkową jest funkcją całkowitej wysokości podnoszenia i ciężaru cieczy pompowanej w danym okresie czasu. Wydajność pompy w galonach na minutę i ciężar właściwy cieczy są zwykle używane we wzorach, a nie rzeczywisty ciężar cieczy.
Wkład pompy lub moc hamowania (BHP) to rzeczywista moc dostarczana do wału pompy. Moc wyjściowa pompy lub moc wodna (WHP) to moc cieczy dostarczana przez pompę. Te dwa pojęcia definiuje się za pomocą następujących wzorów:

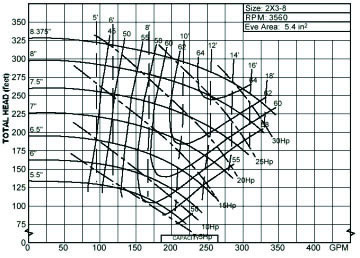
Odczytywanie krzywej wydajności pompy
Charakterystyki pompy – takie jak przepływ, ciśnienie, sprawność i moc hamowania – są przedstawione graficznie na krzywej pompy. Pierwszym elementem, na który należy zwrócić uwagę, jest wielkość pompy. Wielkość pompy, 2×3-8 jest pokazana w górnej części wykresu. Numery 2×3-8 oznaczają:
- Wylot (port wylotowy) ma 2 cale.
- Wlot (port ssący) ma 3 cale.
- Wirnik ma średnicę 8 cali.
Niektóre firmy mogą mieć numer pokazany jako 3×2-8. Większa z dwóch pierwszych liczb to wlot. Prędkość pompy (obr/min) jest również pokazana w górnej części wykresu i wskazuje wydajność przy prędkości 3560 obr/min. Wszystkie informacje są reprezentatywne dla tej prędkości operacyjnej.
Wydajność lub przepływ jest pokazany wzdłuż dolnej części krzywej. Poziomy przepływu są pokazane dla prędkości roboczej 3 560 obr/min, ale wskazują wpływ wysokości podnoszenia, ponieważ wylot jest dławiony.
Lewa strona krzywej wydajności pokazuje wysokość podnoszenia (w stopach) generowaną przy różnych wartościach przepływu. Na wykresie znajduje się wiele krzywych przepływu w zależności od wysokości podnoszenia (patrz Rysunek 3). Każda z nich reprezentuje inną (przyciętą) wielkość wirnika. Dla tej pompy, zakres wirników wynosi od 5,5 cala do 8,375 cala.
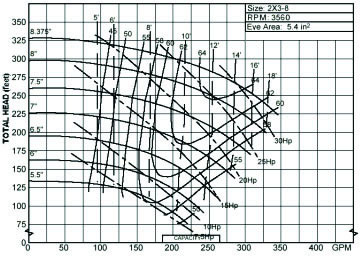
Rysunek 3. Przykładowa krzywa wydajności pompy
Krzywe sprawności nałożone na wykres (linie pionowe) wskazują od 64 do 45% sprawności dla tej pompy. Wraz ze wzrostem wysokości podnoszenia, przepływ i sprawność maleją.
Koniec hamowania jest pokazany liniami przerywanymi biegnącymi ukośnie od lewego górnego rogu do prawego dolnego. Krzywe BHP są pokazane dla mocy od 7,5 do 30 KM. Przy użyciu wirnika 8-calowego i przepływie 250 gpm, BHP wynosi około 25 koni mechanicznych.
Prawa pokrewieństwa stosowane w pompach odśrodkowych
Krzywe pompy i systemu
Krzywa pompy jest wyłącznie funkcją charakterystyki fizycznej pompy. Krzywa systemu jest całkowicie zależna od rozmiaru rury, długości rury, liczby i lokalizacji kolanek i innych czynników. Miejsce przecięcia się tych dwóch krzywych to naturalny punkt pracy (patrz rys. 4). Jest to miejsce, w którym ciśnienie pompy odpowiada stratom w systemie i wszystko jest zrównoważone.
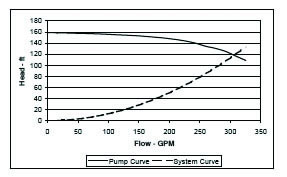
Rysunek 4. Przykładowe krzywe układu pomp
Jeśli układ jest częścią procesu, który zmienia się często lub w sposób ciągły, konieczna jest jakaś metoda zmiany charakterystyki pompy lub parametrów układu. Dwie metody umożliwiają osiągnięcie celu ciągłej zmiany przepływu. Jedną z nich jest dławienie, które zmienia krzywą systemu za pomocą zaworu regulacyjnego lub dławiącego. Drugą metodą jest zmiana prędkości pompy, która modyfikuje krzywą pompy.
System dławienia
W przypadku metody dławienia, zablokowanie przepływu zwiększa ciśnienie głowicy. Układ z dwoma różnymi ustawieniami zaworów pokazano na rysunku 6.
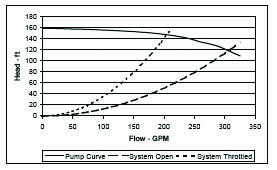
Rysunek 5. Układ dławiący
Rysunek 6. Przykładowe zapotrzebowanie na moc dla układu dławiącego
Dla porównania posłużmy się przykładem, aby określić zapotrzebowanie na moc dla układu dławiącego, a następnie dla układu zmiennej prędkości. Używana jest pompa (z wirnikiem 8-calowym) pracująca z prędkością podstawową 3560 obr/min. Pompa ta ma obsługiwać system wymagający wysokości podnoszenia 250 stóp przy 250 galonów na minutę (zob. rys. 6).
Z przedstawionych informacji wynika, że zapotrzebowanie na moc przy natężeniu przepływu w systemie dławiącym przedstawiono w tabeli 1.
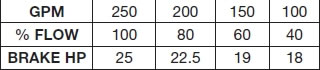
Tabela 1. Zapotrzebowanie na moc układu dławiącego
System zmiennej prędkości
W porównaniu, metoda zmiennej prędkości wykorzystuje zmianę charakterystyki pompy, która występuje przy zmianie prędkości wirnika (patrz Rysunek 7). Mniejsza prędkość pompy zmienia krzywą pompy w oparciu o wysokość podnoszenia generowaną przez prędkość pompowanej cieczy. Należy pamiętać, że wysokość podnoszenia jest równa V2/2g.
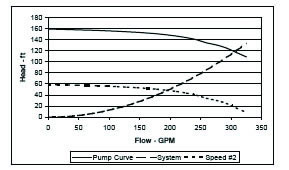
Rysunek 7. Przykładowy układ o zmiennej prędkości
Prawa powinowactwa
Zbiór wzorów używanych do przewidywania pracy pompy odśrodkowej w dowolnym punkcie pracy na podstawie pierwotnej charakterystyki pompy jest znany jako prawa powinowactwa.

Gdzie:
N = Prędkość pompy
Q = Przepływ (gpm)
P = Ciśnienie (stopy)
HP = Moc konna
Przy użyciu tego samego przykładu pompy jako systemu dławiącego, wymagania dotyczące mocy są obliczane dla systemu dla różnych
prędkości (patrz Tabela 2).
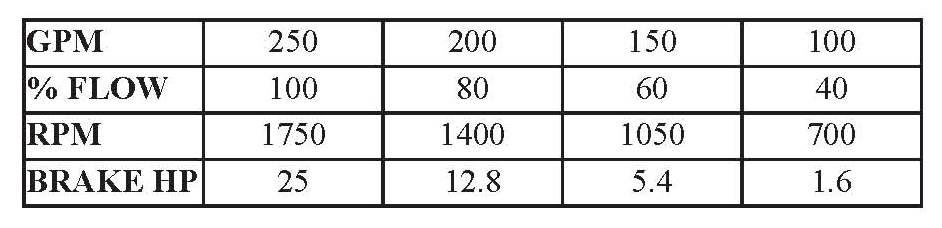
Wykorzystaj prawa powinowactwa do obliczenia wartości dla pozostałych punktów pracy. Oczywiście, zmiana prędkości wymaga znacznie mniejszej mocy. Aby określić rzeczywistą wymaganą moc, należy uwzględnić sprawność napędu. Oszczędność energii będzie zależeć od czasu pracy pompy przy każdym punkcie zredukowanej prędkości.
Aby obliczyć rzeczywistą oszczędność, należy przeliczyć konie mechaniczne hamulca na waty, a następnie pomnożyć je przez godziny pracy. Wynik jest następnie mnożony przez koszt kilowatogodziny, aby pokazać koszt eksploatacji pompy przy każdym punkcie przepływu. Odjąć wartość zmiennej prędkości od wartości dławienia, aby pokazać różnicę w kosztach energii.
Przy użyciu danych z tabeli 2, przepływ 200 gpm przy dławieniu wymaga 22,5 konia mechanicznego. Przy zmiennej prędkości wymagane jest tylko 12,8 konia mechanicznego. Jeśli przepływ jest wymagany przez 2000 godzin rocznie przy cenie 7 centów za kilowatogodzinę, porównanie kosztów wygląda następująco:
System dławienia:
22,5 KM x 0,746 = 16,785 kW
16,785 x 2000 = 33 570 kWh
33 570 x 0.07 = $2,350
System o zmiennej prędkości:
12,8 x 0,746 = 9,5488 kW
9,5488 x 2,000 = 19,097 kWh
19,097 x 0,07 = $1,337
Oszczędności:
$2,350 -$1,337 = $1,013
Przykład nie miał statycznej głowicy związanej z nim. System z głowicą statyczną zmienia krzywą systemu i wymagania dotyczące mocy. Im większa wysokość słupa statycznego w systemie, tym mniejsze możliwe oszczędności energii. Dzieje się tak dlatego, że krzywa systemu jest bardziej płaska, więc większość energii jest wykorzystywana do pokonania zmiany wysokości związanej z systemami o wysokiej wysokości statycznej. Większość systemów pompowych jest projektowana i przewymiarowywana dla najgorszych warunków obciążenia. Zgodnie z zasadą prawa pokrewieństwa, już samo obniżenie przepływu w przewymiarowanej pompie odśrodkowej o 20% może zmniejszyć zużycie energii o około 50%, co daje ogromne oszczędności energii.